

The importance of the Speed-Torque Gradient in DC Motor Sizing
March 29, 2019
By: Warren Osak, CEO/Founder of Electromate
Often overlooked when sizing DC motors is the Speed-Torque Gradient.
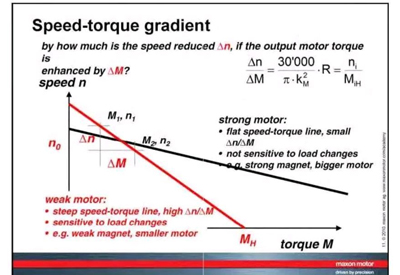
The Speed-Torque Gradient is defined as Δn / ΔM [rpm/mNm] .
The speed / torque gradient is an indicator of a motor’s performance. The smaller the value, the more powerful the motor and consequently the less motor speed varies with load variations. It is based on the quotient of ideal no-load speed and ideal stall torque.
The speed torque-gradient can be considered a measure of the motor strength, which is defined by motor type and size and not the winding selected. Basically it’s how much speed drop the motor will have for each 1mNm of torque applied.
In the figure above, enhancing the load torque leads to a linear reduction of the speed. Thus it becomes clear what the meaning of Δn/ΔM is: It’s the gradient of the speed-torque line.






